今天南山电子向大家介绍一款
爱普生高精度陀螺仪姿态检测模组,即EPSON的GGPM61高精度陀螺仪惯性导航模组。GGPM61是高精度偏航角陀螺仪模组,输出三轴加速度值,三轴角速度值,姿态角(Pitch,Roll,Yaw),温度。同时,GGPM61的数字通讯接口为UART或IIC,拥有低功耗的特点。欢迎咨询选购爱普生GGPM61陀螺仪。
我们就爱普生高精度陀螺仪姿态检测模组GGPM61的重要参数进行说明解释。
GGPM61的管脚定义
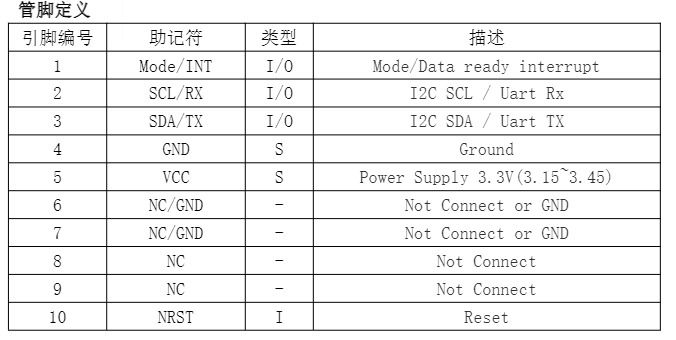
1)引脚类型I:输入,O:输出,I/O:输入/输出,S:电源
2)UART和I2C不能同时使用,根据上电时刻Mode脚位的状态决定
3)如果没有使用/RST引脚,请将引脚保持在高电压(VCC)水平。
GGPM61的数据格式

数据说明:
实际的角速度=输出值/64(度/秒)
实际的加速度=输出值(mg)
实际的姿态角=输出值/100(度)
参考温度=输出值/100(摄氏度)
checksum=Bytes2+Bytes3+...+Bytes24+Bytes25.
串口控制命令

*:发送波特率设置命令以后,必须后面再发送Flash更新命令,用以保存新的设置,新的设置在器件重新上电或者复位后生效。
GGPM61的Yaw角清零和设置命令:

说明:
1,设定高精度姿态传感器角度值为实际设置角度值的100倍,
2,比如要写入的值为36度,则要写入3600数据(0x0E10).CRC:0x15D9.0xFF0x1E0x100x0E0x000x000xD90x15
3,如果设定的角度值为-20度,则需要写入-2000(0xF830).CRC:0xE732.0xFF0x1E0x300xF80x000x000x320xE7
4,如果需要清零,则按如上表格的数据0xFF0x1E0x000x000x000x000xBC0x16
5,CRC校验参考CRC-16/MODBUSX16+X15+X2+1
6,CRC校验工具
陀螺仪不敏感阀值设定

说明:
1,offsetByte2用于设置阀值数据,设定值从0到0xFF,对应于0.0dps到1.0dps,
2,如上当设置值为0x80时,对应的值为128/256=0.5dps
3,高精度陀螺仪模块出厂时默认值设置为0.3dps,通常可以满足绝大部分的应用,如果有需要可以更改,更改完后需要执行FLAS保存的命令,下次开机后就是新的值。
GGPM61的波特率设置:
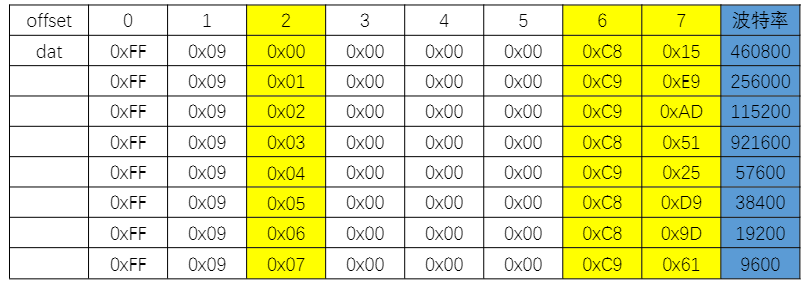
说明:1,波特率更改后需要执行Flash保存命令,下一次启动后生效。
GGPM6110的输出数据率设置:

说明:
1,数据输出率设置后需要执行Flash保存命令,下一次启动后生效。
2,*大输出率为100HZ
3,当设置为0Hz的时候,数据将不输出

 公安备案号32010402000033
公安备案号32010402000033

